基于矢量空间解耦的双三相PMSM的电机模型基本上已经结束了(其实还有一个调制没有介绍的说,不过这部分其实和普通的三相PMSM的调制比较类似——当然如果想优化的话好像也是有很多内容的,包含了很多矢量选择的问题,这里就先不过多叙述了,后续看有没有时间,可以再更新一下)。
这篇主要是针对适量空间解耦的双三相PMSM的九开关控制拓扑进行的介绍。九开关拓扑,顾名思义就是使用9个开关器件对双三相电机进行控制(一般来说双三相电机是使用两个三相两电平的控制拓扑,即12个开关器件)。使用9个开关器件的优势就是减小了电力电子器件的使用,从12个器件变成了9个,提高了系统的经济型。然而使用该拓扑也会带来很多问题——
①电力电子器件(如IGBT)的减少会导致整个系统的最大输出能力有所下降,相同负载的情况下,输出转速下降明显;相同转速下,带负载能力下降且转矩会出现较大的纹波。②系统的容错能力会大幅下降,尤其对于逆变器侧的开路故障,基本如果有IGBT出现开路的情况,那整个桥臂都无法继续使用;如果是电机绕组侧故障,理论上是可以进行容错的控制,但是对调制算法的要求非常高,也是非常困难的。
综上所述,九开关拓扑的使用场景主要是在小功率输出,需要减小系统体积的场景下。尤其注意的是,该系统需要可靠性较高的电力电子器件,以减小出现逆变器侧开路故障的可能。
九开关逆变器的拓扑结构如下图所示:
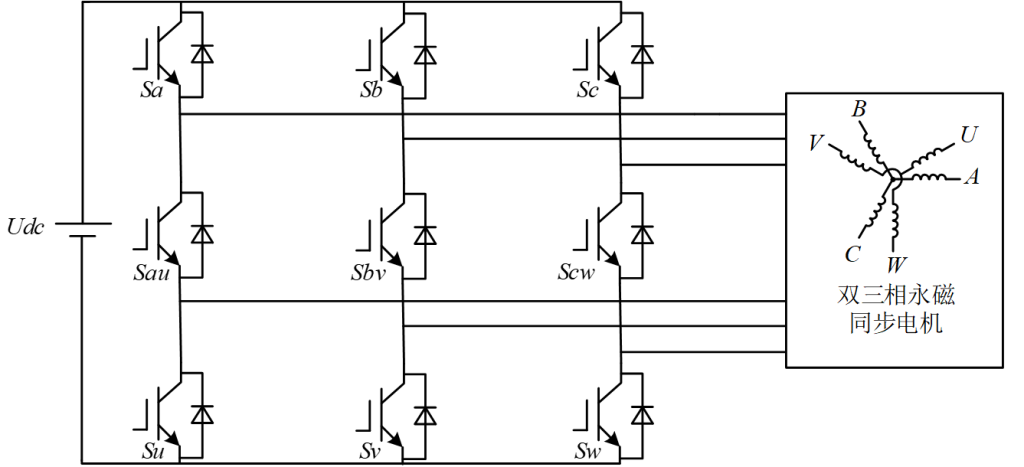
如图所示,九个开关器件分布在三个桥臂上,每个桥臂上是三个IGBT开关器件。双三相永磁同步电机的A、B、C相接在桥臂上端和中端的开关器件中,电机的U、V、W相接在桥臂的中端和下端的开关器件中。
由于拓扑结构发生了变化,导致其调制也对应的发生了变化——
九开关逆变器的开关状态是完全不同于十二开关逆变器的两个三相两电平的开关状态的。九开关逆变器一共只有29个开关状态,其中,只有27个开关状态是可以用于驱动双三相PMSM的。根据九开关拓扑,其每个桥臂的开关约束一共有两个:
①同一时刻,同一桥臂应有两个开关管开通,中间开关管的开关信号由上、下两个开关管的开关信号经“异或”运算获得。
②任意时刻桥臂电压VAN和VDN必须满足条件: VAN≥VDN。这是由于下半桥臂的导通必须是以上半桥臂的导通为前提的。
接下来给出27个状态的开关模式——
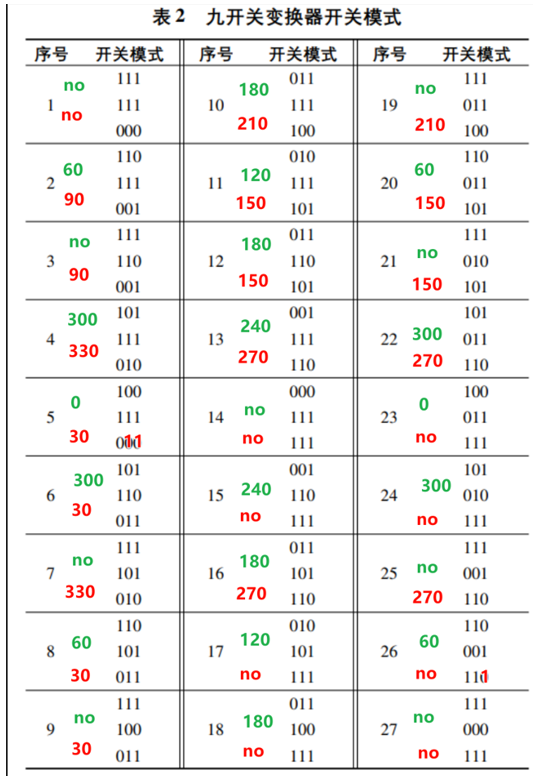
其中,绿色标出的为上侧绕组的矢量角度,红色标出的为下侧绕组的矢量角度。
根据上述的表格,可以画出空间矢量图——
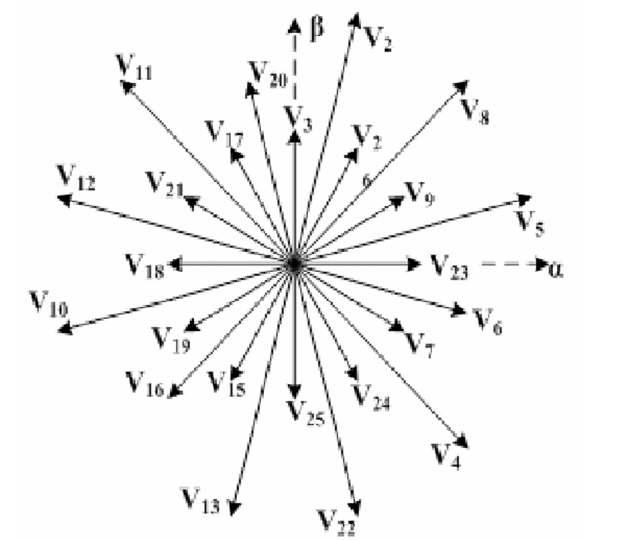
由图片可以看出,实际上,九开关逆变器的空间矢量并不是均匀对称的。因为由于九开关逆变器的拓扑本身的特性,即由于上文所说的约束②的存在,九开关逆变器无法做到下侧绕组供电而上侧绕组不供电的情况,导致了九开关逆变器在空间上的矢量并不对称。
这就导致了编号20、16和6的三个矢量的长度相较于外圈的矢量短了一些。因此在调制上,我们是选择了内圈的小矢量进行的。
在调制过程中,由于存在了约束①,我们对于九开关逆变器的调制其实并不复杂。我们只需要对上侧开关器件和下侧开关器件进行调制计算,中间的开关器件只需要使用约束①进行即可——
其实不难发现,在控制矢量图中,内圈小矢量对应在九开关矢量控制表中,上侧绕组和下侧绕组肯定有一个是no(即处在非作用的状态下)。换句话说,就是使用内侧矢量进行调制的本质是,同一时刻只对双三相电机的一套绕组进行控制,两套绕组交替进行的方式进行控制的。这就很好的说明了——
①为何使用九开关拓扑控制双三相电机的输出能力会下降,因为本质上说同一时刻就是一个三相电机在进行输出;
②为何容错能力下降,因为单三相电机是不具备容错能力的。
控制方式上,九开关逆变器控制的双三相电机相对于两个三相两电平的控制拓扑并没有什么大的变化——同样是内环电流环,外环转速环,使用了pi控制器进行控制。一般来说,忽略逆变器延时,所以两种拓扑的pi环参数理论上应该是一模一样的。
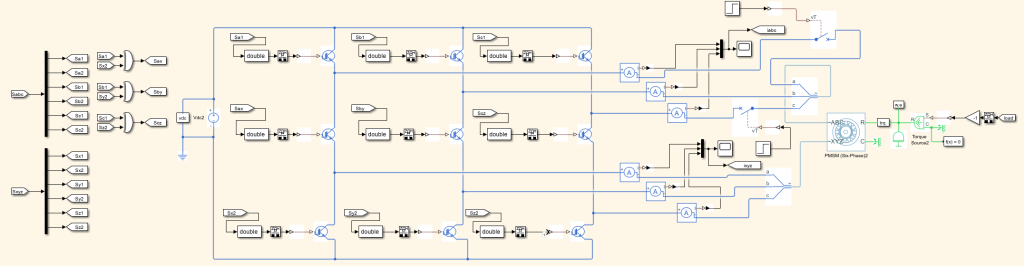
最后展示仿真部分:
参照Matlab/Simulink中三相永磁同步电机的数学模型,这里搭建了基于九开关逆变器的双三相永磁同步电机的仿真。
控制部分(使用SVPWM算法):
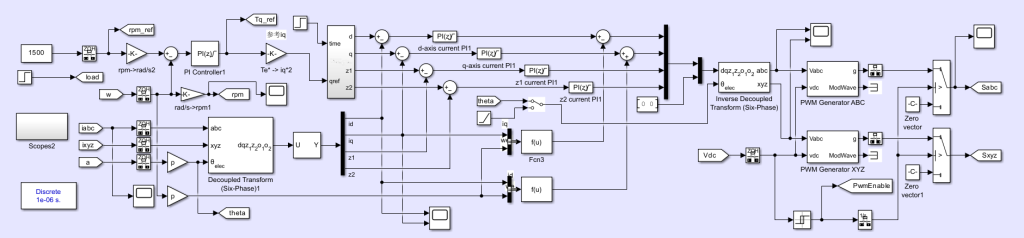
电机部分: