鉴于师兄马上就要毕业了,经手的dSPACE还有电机控制板的一些东西需要继承。在此记录一下dSPACE的使用方法和电机控制板的一些硬件内容。
一、通讯配置
通讯配置主要是dSPACE和主机之间通讯,具体步骤如下:
①安装dSPACE MicroLabBox,具体安装教程参见链接http://Download.Charlis.top/Document_For_Download/dSPACE_install_20250528.pdf
②dSPACE进行通电,将dSPACE开关打开,用数据传输线把dSPACE和主机进行连接,将密钥接入主机。
③确保已将主机的网络ip地址设置为固定地址,具体设置地址如下所示:
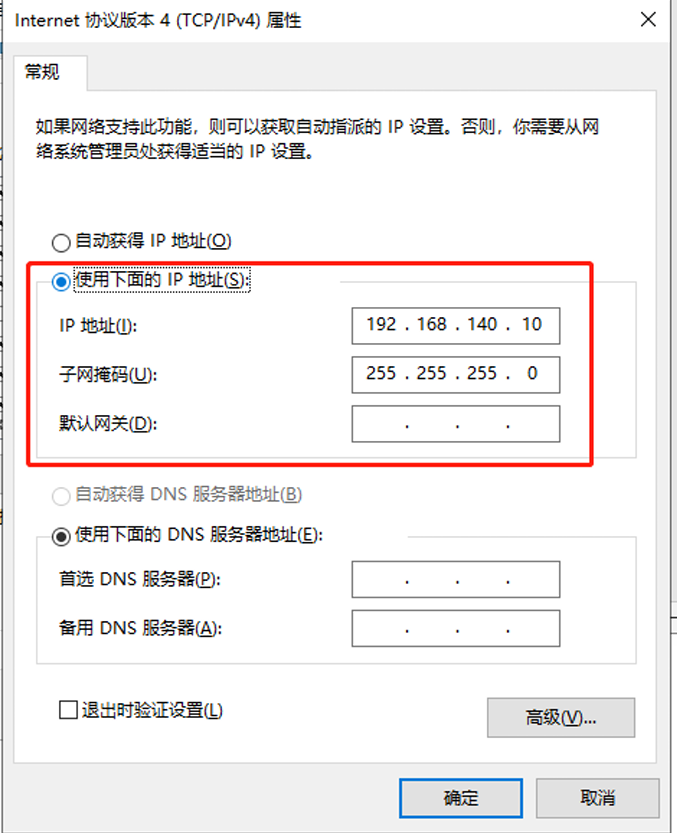
【注意,如果电脑使用有线网连接时,需要将ip地址重新设为自动分配,否则在该固定地址下会出现有线网连接不上的情况】
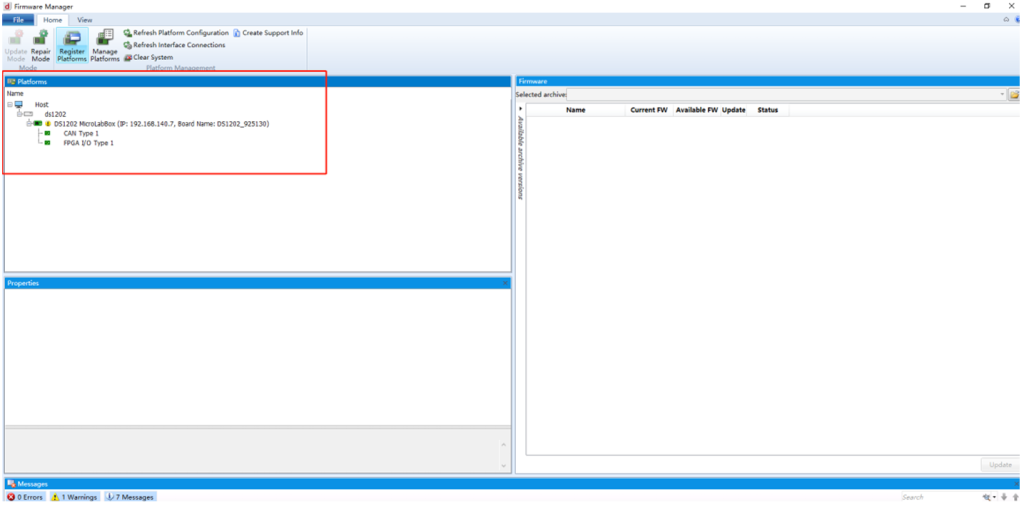
按照安装教程中的方式使用dSPACE Firmware管理软件进行地址配置,直到实现下图所示界面,则标志着配置完成。
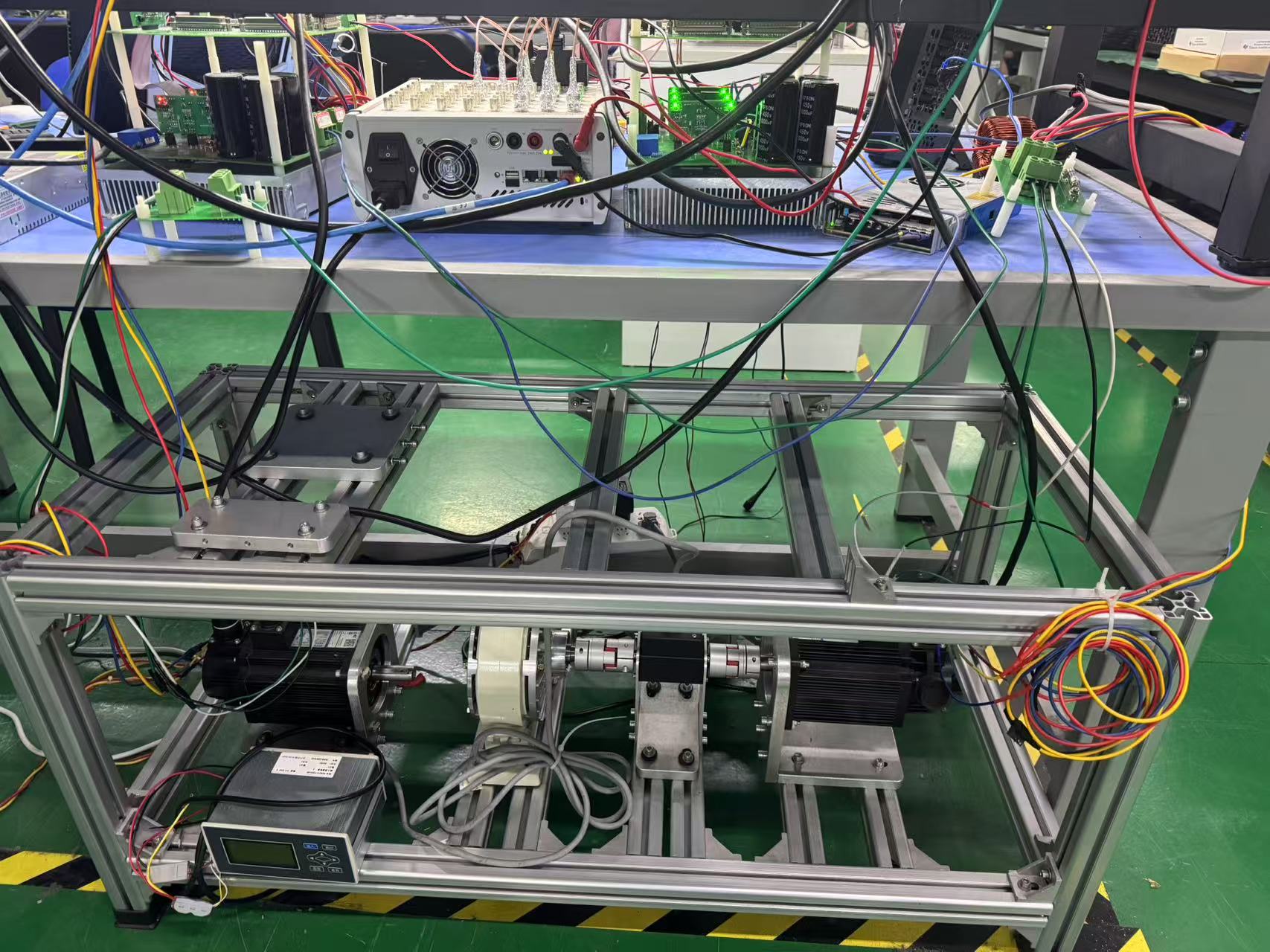
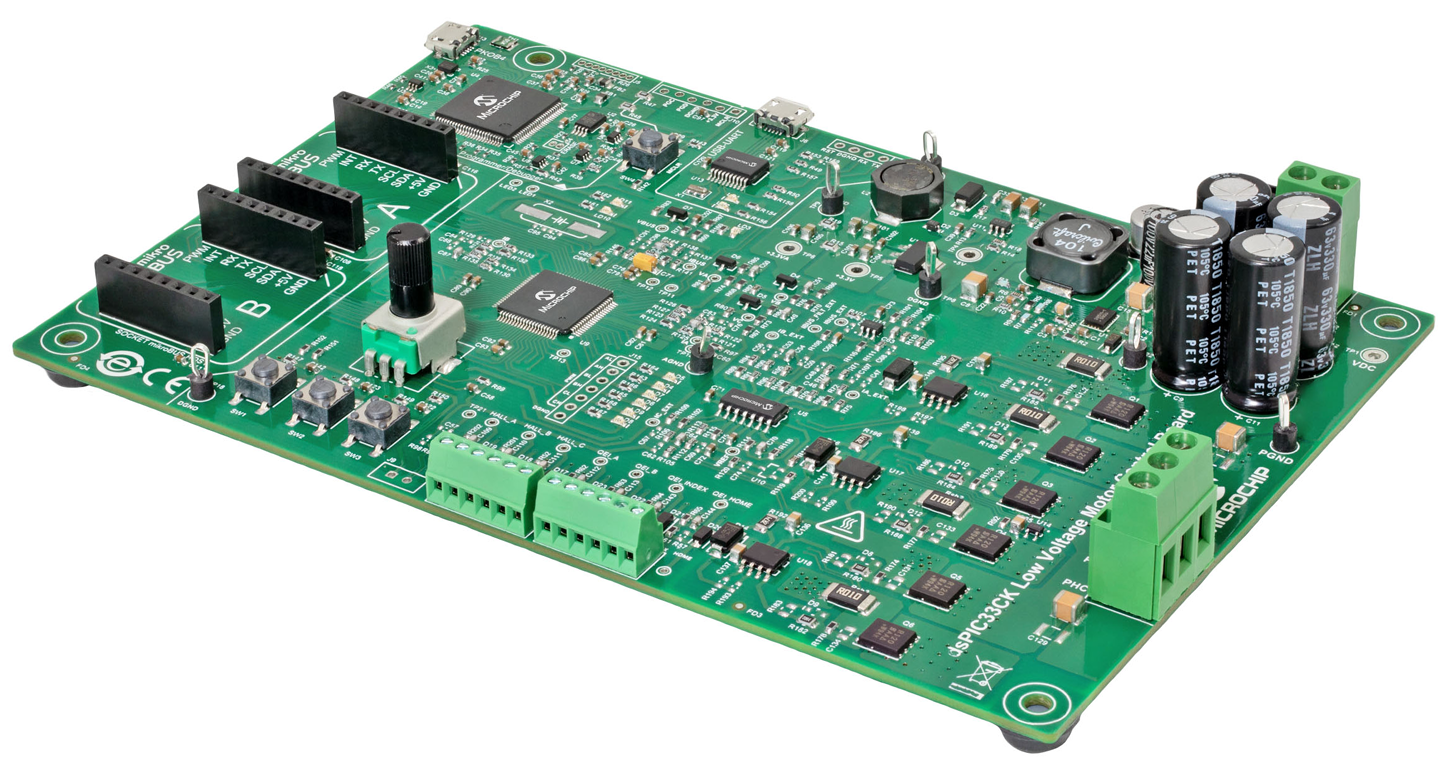
二、硬件配置
硬件配置主要是对电路板进行供电,对母线进行供电,已经对电机的控制拓扑进行更改(本文介绍的是中性点供电的拓扑结构,也可以接入普通的三相电机控制拓扑结构)。
④正确接入电机控制拓扑并进行检查,确保电路拓扑接入正确。然后电路板24V电源接入,母线电源接入并打开开关。驱动板灯亮。
三、程序建立并写入
程序的建立写入主要是使用simulink进行代码的编译,然后将自动生成的代码写入dSPACE,用于控制PWM信号,从而控制电机。
⑤打开BIGPMSM_parameters_1这个m文件,运行后打开simulink程序BIGPMSM_1,使用Ctrl+B进行程序编译,编译后如下图为编译完成:
四、升压配置
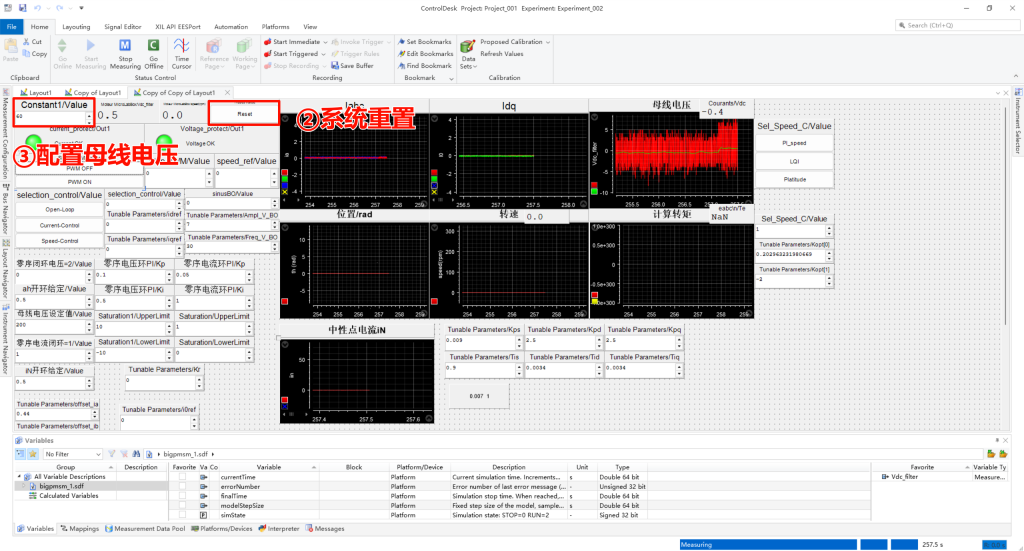
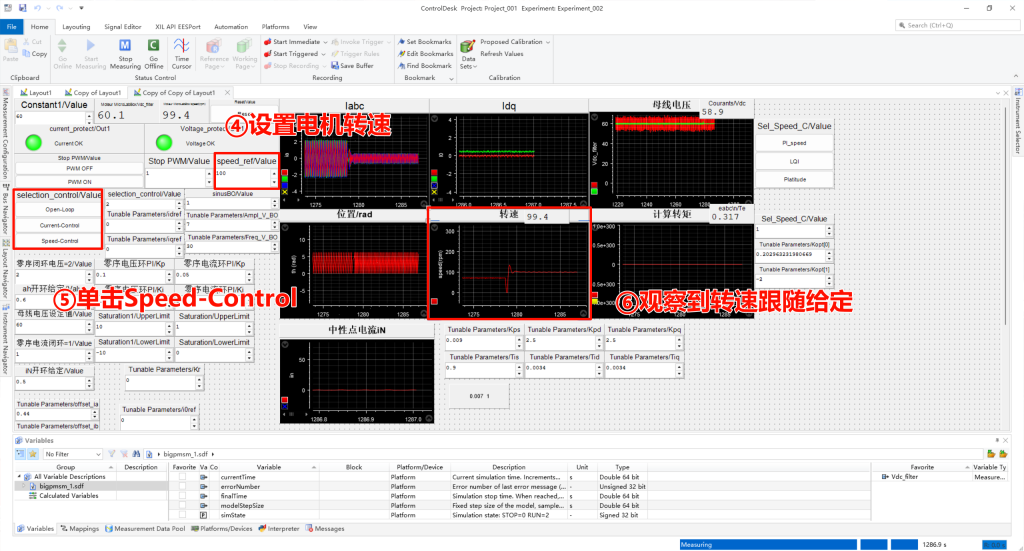
打开dSPACE ControlDesk,进入Project_001的Experiment_002程序,进入程序后界面如图所示:
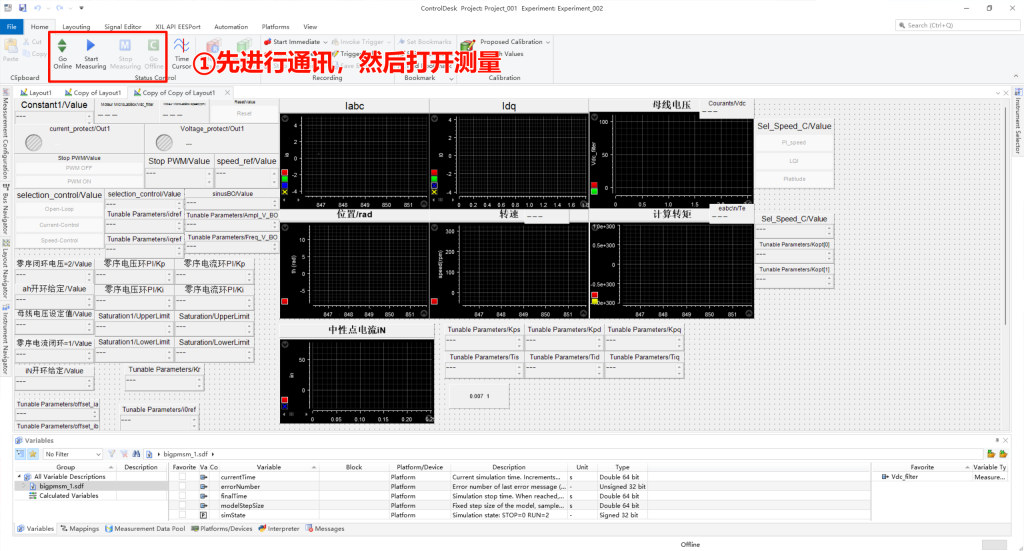
将左上角的Go Online点开,然后点击右边的Start Measuring开启测量。完成后,按下图进行设置:
将直流电源设置为给定的值(例如30V升压到60V)。点击Open-loop,将开环给定ah设置为0.9。单击PWM ON。观察到开环升压(如下图图一)。
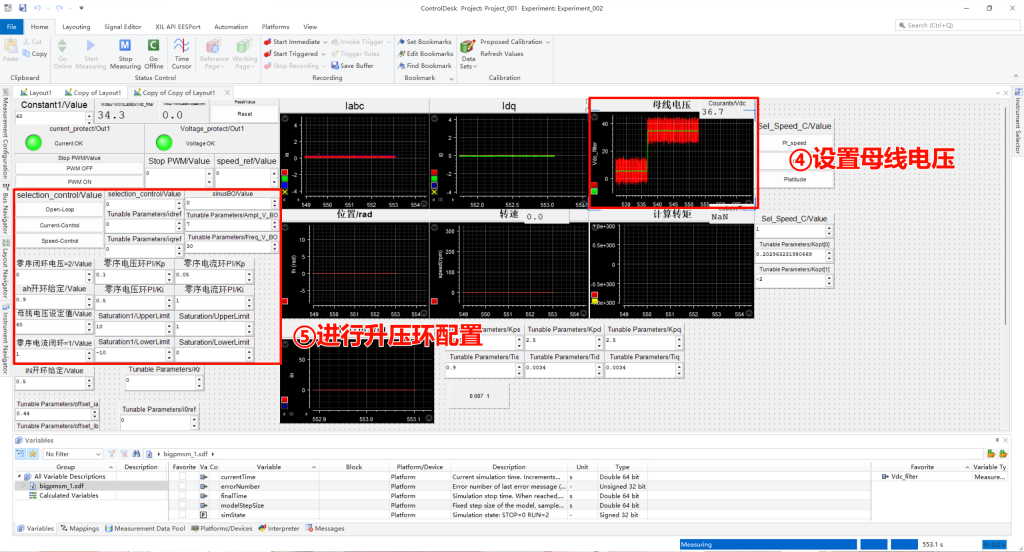
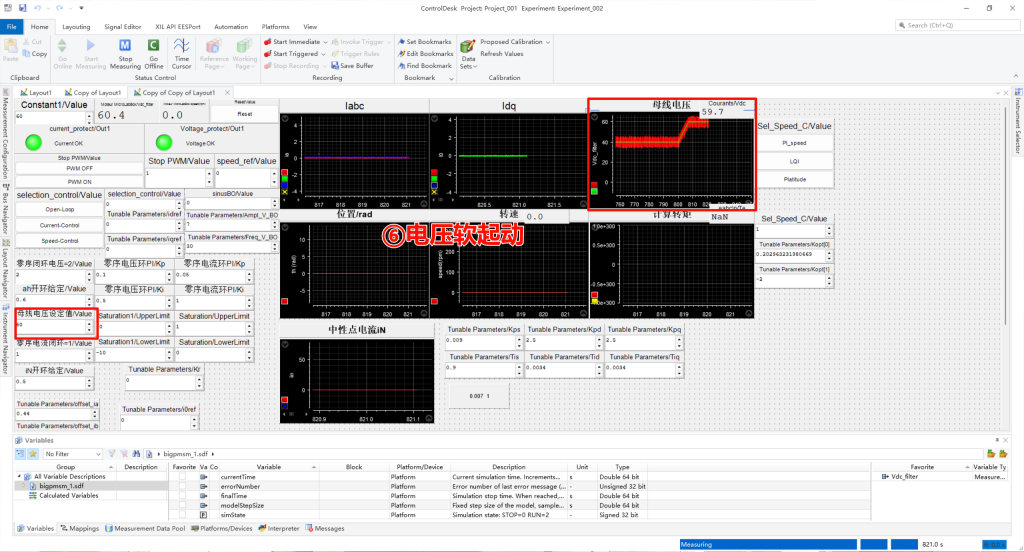
将开环配置的ah从0.9逐渐减小,减小到0.6后,升压比为1/0.6(1.67),即可以观察到母线电压约为50V.然后将母线电压设定值进行修改(设置为60V),再将零序电压闭环电压设置为2,启动闭环控制(如下图图二设置)。
【或将开环配置为0.9,此时升压比为1/0.9(1.11)即可观察到母线电压约为33V,此时将母线电压设定值进行修改(设置为40V),再将零序电压闭环电压设置为2,启动闭环控制。在闭环控制下,继续更改电压参考,缓慢(步长为1V)调节至60V】
此处的核心思想是进行电压升压的软起动!
五、电机运行配置
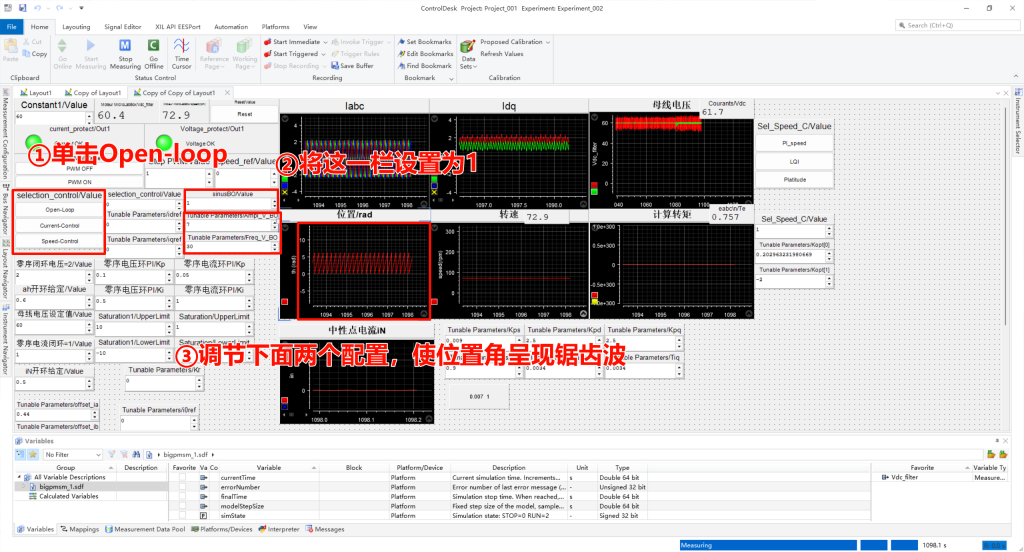
在升压达到目标值后,进行电机运行的配置。和升压配置一样,首先进行电机的开环控制。
首先设置电机的运行状态为开环运行状态,然后将图一上的参数设置为1,启动开环控制。观察电机的机械角度是否是锯齿波。如果不是锯齿波,需要微调下边两个配置,使电机在稳定转速下运行。如图三所示。
在电机在开环状态下稳定运行后,先设定电机转速(注意开环时大约为70转,则电机转速设置最好为100转,设定转速时不宜偏差过大,提高转速按100转每次提高,以达到期望转速。)如图四所示。
此处的核心思想是进行电机的软起动!
六、关机顺序
关机时应先将电机闭环转速缓慢下降至0转,将开环关闭后切入开环运行模式(此时电机应该停转)。然后将闭环的母线电压控制进行电压下降,降到电源电压值后设定ah为1,切入电压的开环控制中。
在电机部分和升压部分分别完成关闭后点击PWM OFF,关闭驱动板输出。然后左上角先后点击Stop Measuring和Go Offline。关闭Control Desk。
硬件部分,关闭直流电源输出并断电,关闭dSPACE并断电,拔掉驱动板输入的直流源,收好dSPACE密钥。
完成关机。

我采用dspace控制电机波形非常差,电机转的也不尽人意,由于是自己第一次搞也没有师兄带,因此根本不知道自己搭的模型哪有问题
Hello,如果你电机能转起来,说明电机、控制器的硬件配置应该是没什么问题,你可以看看控制,不知道你是不是用的矢量控制了……不过欢迎加我一起讨论一下的
我的确是用的矢量控制双闭环,个人感觉可能是dspace的某些模块配置有问题,但具体不清楚问题在哪,请问能否提供您的simulink模型供我参考学习下,当然也可以付费学习,在此不胜感激
我的QQ:772932969,可以一起讨论一下